Los reguladores PID se utilizan sobre todo para influir en determinadas variables medidas. Como reguladores inteligentes 3 en 1, demuestran su eficacia a diario en numerosos sistemas industriales y controlan con gran precisión el punto de consigna. Aquí encontrará los datos y cifras más importantes sobre el control PID.
Un regulador PID digital puede programarse y parametrizarse universalmente mediante un microprocesador integrado. Funciona de forma proporcional, integradora y diferenciadora (PID), por lo que la intensidad de los componentes individuales se adapta al sistema controlado. Para ello se dimensionan los parámetros de regulación
El principio de funcionamiento de un regulador PID es relativamente sencillo de explicar. No importa si se trata de un regulador PID de temperatura o un regulador PID de humedad, el regulador siempre intenta ajustar una variable de control específica al valor de consigna basándose en el valor real. En este caso, el componente P amplifica la desviación de control, el componente I aumenta su nivel de salida en caso de desviación de control existente y el componente D contrarresta el movimiento del valor real. Los componentes que no son necesarios para el control pueden desactivarse. En función de la aplicación, pueden funcionar como reguladores PI, reguladores P, reguladores PD o reguladores I.
Para la mayoría de las aplicaciones, la estructura PID tiene el mejor comportamiento de control. Por ejemplo, los reguladores PID compactos son muy comunes en el campo del control de la temperatura; además, permiten la conexión directa de termómetros de resistencia y termopares. Algunas variables controladas requieren la desactivación de determinados componentes, como la velocidad y el caudal, entre otros.
El componente P reacciona muy rápidamente y amplifica la diferencia de regulación; su desviación de regulación permanente tiene un efecto negativo. El parámetro de control responsable es la banda proporcional Xp. Con Xp de menor dimensión, el regulador es más rápido y la desviación de control menor. Sin embargo, el sistema global tiende a oscilar cada vez más.
El componente I elimina la desviación de control. Si el tiempo de reajuste Tn se ajusta más bajo, el regulador aumenta su nivel de salida más rápidamente y también contrarresta la desviación de control más rápidamente. Sin embargo, si el ajuste es demasiado bajo, también se producirá un comportamiento oscilatorio.
El componente D contrarresta el movimiento del valor real. En el caso de un regulador para calefacción, significa que la proporción se reduce cuando el valor real aumenta y aumenta cuando el valor real disminuye. El comportamiento descrito tiene un efecto amortiguador. El parámetro responsable es el tiempo de derivada Tv. Cuanto mayor sea Tv, mayor será el efecto descrito.
El comportamiento de los sistemas controlados depende siempre del punto de funcionamiento. Por lo tanto, antes de la optimización, la planta debe configurarse en un estado de funcionamiento para el que, más tarde, se esperan parámetros de control favorables. Por ejemplo, un horno se carga antes de la optimización y debe generarse una aceptación para un calentador de agua instantáneo. Si hay que especificar un valor de consigna durante la optimización, estará en el rango de funcionamiento posterior.
Si existen instalaciones/lazos de regulación comparables, los parámetros de regulación utilizados en ellos pueden utilizarse a modo de prueba. Si este planteamiento no conduce al objetivo, se puede utilizar uno de los siguientes métodos de optimización.
Método de vibración según Ziegler y Nichols
Este método se utiliza para sistemas controlados relativamente rápidos. Para la preparación, se parametriza la estructura P y se fija una XP relativamente grande. En la siguiente figura se define un valor de consigna en el rango de trabajo posterior.
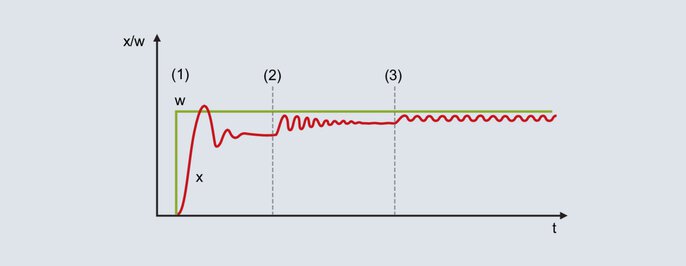
Fig. 52: Curva de consigna y valor real al utilizar el método de oscilación
Con la banda proporcional relativamente amplia establecida, el valor actual se dirige hacia el valor final con una baja tendencia a la oscilación [Figura 52 (1)]. Debido a la inexistente estructura I, está presente una desviación de control permanente.
El XP se reduce (Figura 52 [2]): El valor actual aumenta y se dirige hacia el valor final con una mayor tendencia a la oscilación. La banda proporcional puede reducirse varias veces hasta que el valor actual oscile permanentemente (Figura 52 [3]). La banda proporcional requerida para este comportamiento se llama XPk (Xp crítico) y debe determinarse lo más precisamente posible (no reducir Xp en pasos demasiado grandes).
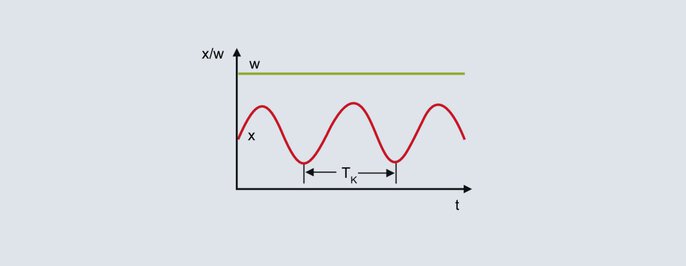
Período crítico
A partir de la oscilación continua del valor actual en la figura superior, se utiliza el período crítico TK para determinar el segundo parámetro del proceso. El período crítico TK (en segundos) resulta, por ejemplo, del intervalo de tiempo entre 2 valores mínimos. XPk y TK se insertan en la siguiente tabla para la estructura del controlador deseado:
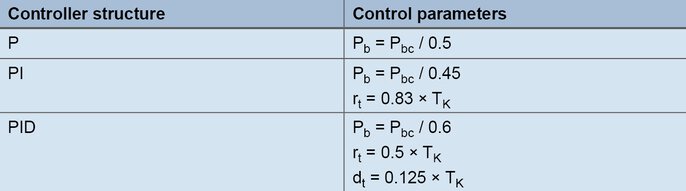
Fórmulas de ajuste según el método de oscilación
Procedimiento según la respuesta del escalón de distancia de Chien, Hrones y Reswic
Con este método, los parámetros de control se determinan de una manera relativamente rápida incluso para sistemas controlados lentos. El método se utiliza para sistemas controlados de 2º orden y superiores y ofrece la particularidad de diferenciar entre las fórmulas para la respuesta al comando y a la perturbación. Para las fórmulas de regla general, el coeficiente de transferencia del sistema controlado, el tiempo de retardo y el tiempo de compensación se determinan a partir de la respuesta al escalón.
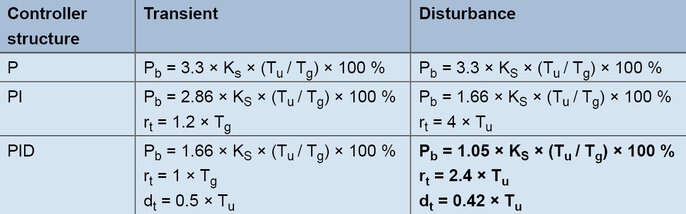
Fórmulas para la creación según la respuesta al escalón de línea
Ejemplo:
Se utilizará un controlador digital con estructura PID para un horno de laboratorio. El objetivo es lograr un buen comportamiento frente a perturbaciones, con puntos de consigna típicos de 200 °C. En el modo manual, el nivel de salida se incrementa en pasos hasta que el valor actual esté ligeramente por debajo del punto de consigna futuro (los procesos de compensación deben esperarse en cada caso). Por ejemplo, se alcanza una temperatura de 180 °C con un nivel de salida del 60 %. A partir del 60 %, se incrementa el nivel de salida en pasos hasta el 80 % y se registra el valor actual.
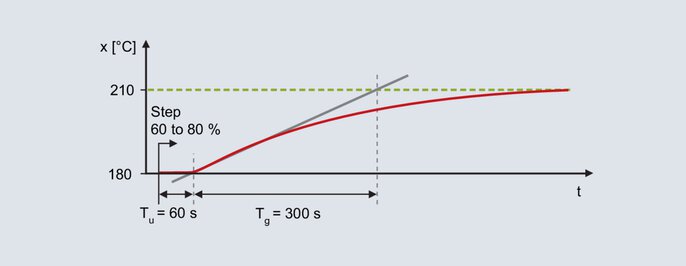
Respuesta escalonada del horno de laboratorio
La respuesta al escalón se determina con la ayuda de la tangente de giro: Tiempo de retardo Tu = 60 s, tiempo de compensación Tg = 300 s. El coeficiente de transmisión del sistema controlado resulta del cambio en el valor actual dividido por el paso de salida.

Ecuación 22
Utilizando las reglas empíricas, se obtienen los siguientes parámetros para el comportamiento de interferencia:

Ecuación 23

Ecuación 24

Ecuación 25
El paso de salida debe realizarse dentro del rango del punto de operación subsiguiente. La altura del paso debe ser lo suficientemente grande como para que se pueda evaluar la curva del valor del proceso. Después de especificar el paso de salida, se espera el valor final del valor actual; una alternativa que ahorra tiempo es el procedimiento según la velocidad de ascenso.
Procedimiento según la velocidad de ascenso
En lo que respecta a la respuesta al escalón, el procedimiento es el mismo que para el procedimiento de respuesta del escalón de distancia. Antes del cambio de escalón, se especifica un nivel de salida con el cual el valor actual está ligeramente por debajo del valor de consigna utilizado posteriormente.
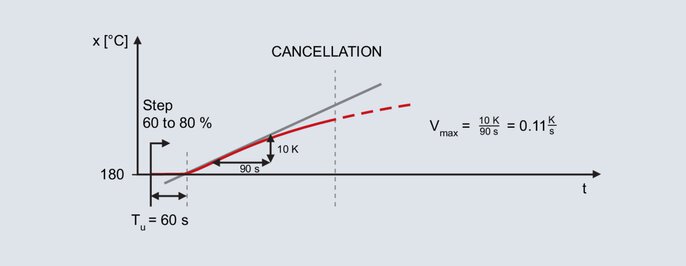
Curva del valor actual para el método según la tasa de cambio
La configuración del escalón se realiza nuevamente para el horno de laboratorio ya mencionado; el punto de operación subsiguiente también es de 200 °C. Al especificar un grado de operación del 60 % en modo manual, se obtiene un valor actual de 180 °C. El nivel de salida se incrementa en pasos hasta el 80 %.
Después de preestablecer el escalón, el valor actual aumenta después de algún tiempo. La grabación continúa hasta que el valor actual alcanza su máxima pendiente. También con este método, se traza la tangente de giro y se determina el tiempo de retardo. El segundo parámetro es la máxima tasa de ascenso, que corresponde a la pendiente de la tangente de giro. La máxima tasa de ascenso se determina mediante un triángulo de gradiente en la tangente de giro:

Ecuación 26
Los valores determinados Vmax (0,11 K/s) y Tu (60 s) se utilizan en las fórmulas siguientes:
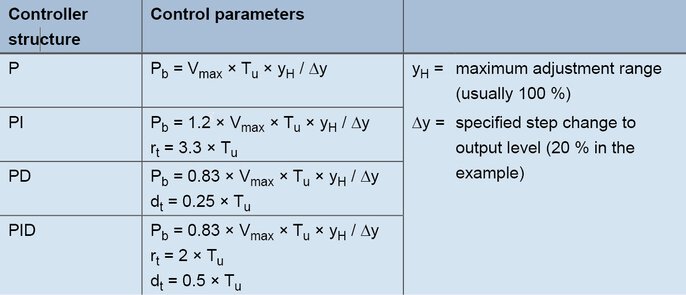
Fórmulas de ajuste en función de la tasa de ascenso
Para un controlador PID, los valores se obtienen con las fórmulas de la siguiente manera:

Ecuación 27

Ecuación 28

Ecuación 29
Método empírico para determinar los parámetros de control
Con este método, se determinan de manera sucesiva las configuraciones favorables para los componentes P, D e I. Partiendo del estado original (nivel de salida 0 %), siempre se especifica el punto de consigna típico; por lo tanto, el método solo puede utilizarse para sistemas controlados relativamente rápidos (por ejemplo, sistemas de control de temperatura rápida y variables controladas como velocidad o caudal).
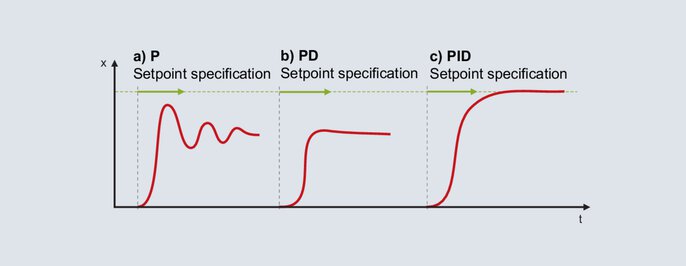
Ajuste de un controlador PID según el método empírico
La estructura P está activada para el regulador digital. La banda proporcional se ajusta relativamente amplia (el dimensionamiento depende del sistema controlado) y el valor de consigna se especifica en el rango de funcionamiento posterior. El valor actual se moverá lentamente hacia el valor final y se obtendrá una desviación de control relativamente grande. Posteriormente, se especifica el punto de consigna con una banda proporcional XP cada vez más pequeña. El objetivo es un Xp en el cual el valor actual alcance su valor final estable después de dos o tres oscilaciones completas (Figura 56a). Para un arranque amortiguado, la estructura se cambia de P a PD. Comenzando con una configuración pequeña para el tiempo derivado, se especifica el punto de consigna con un Tv cada vez mayor. Si el valor del proceso alcanza su valor final con la oscilación más pequeña posible, se tiene un Tv favorable (Figura 56b).
Nota: En cuanto el regulador pone el nivel de salida a 0 % aunque sea una vez durante el arranque, el Tv está ajustado demasiado alto.
Con el cambio a la estructura PID, se activa el componente I. El tiempo de reajuste Tn se establece generalmente favorablemente con cuatro veces el valor del Tv determinado previamente. La Figura 56c muestra el comportamiento para una configuración Tn = 4 × Tv.
Para algunas líneas, no todos los componentes pueden activarse. Si una estructura P resulta en un comportamiento inestable incluso para configuraciones grandes de XP, no se pueden usar ni la estructura P ni la D. Se utiliza el controlador I.
Si la optimización del controlador P tuvo éxito, pero la introducción del componente D hace que el lazo de control sea inestable, se utiliza la estructura PI.
Lo más probable es que la aplicación de los métodos de optimización presentados dé como resultado un comportamiento de control estable, pero no óptimo. El ajuste manual posterior mejorará aún más el resultado del control. Si el comportamiento de un regulador PID se puede asignar a una de las curvas 62b a 62e, encontrará instrucciones para una optimización posterior a continuación.
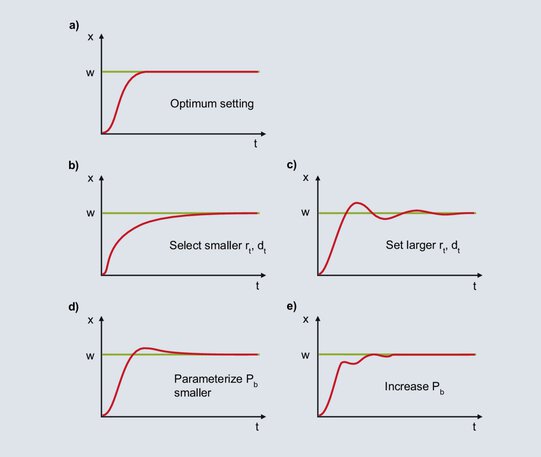
Fig. 62: Notas sobre el ajuste posterior de un controlador PID
El diagrama muestra un comportamiento óptimo para un controlador PID.
Una vez especificado el valor de consigna, el valor del proceso aumenta bruscamente hasta alcanzar la banda proporcional. Cuando el valor del proceso alcanza la banda proporcional, el componente P se reduce y el componente I garantiza que se alcance el valor de consigna. Debido a la configuración relativamente grande de Tn, el aumento del componente I es lento y la desviación de control se elimina lentamente. Para una integración más rápida, Tn debe ajustarse más bajo; Tv también se reduce según la relación Tv/Tn = 1/4.
Cuando el valor del proceso entra en la banda proporcional, el componente I aumenta la proporción de salida. El aumento continúa hasta que el valor del proceso alcanza el punto de consigna. En el caso mostrado, el componente I acumula demasiada salida hasta que se elimina la desviación de control, y el valor del proceso supera el punto de consigna. Con la presencia de una desviación del sistema negativa, el nivel de salida se reduce demasiado rápido, el valor real cae por debajo del punto de consigna, etc. La oscilación simétrica del valor real en torno a la consigna indica que Tn está ajustado demasiado bajo. Tn debe aumentarse y Tv también debe aumentarse según la relación Tv / Tn = 1/4.
El componente I se forma desde el momento en que el valor del proceso entra en la banda proporcional hasta que se elimina la desviación de control. Debido a la gran configuración de Xp, el componente I comienza a formar la proporción de salida ya con una gran desviación de control. Debido a la gran desviación de control al principio, el componente I forma su proporción de salida relativamente rápido. Cuando se elimina la desviación de control, el componente I es demasiado grande y el valor real supera el punto de consigna. Con un ajuste menor de Xp, el componente I empieza a formar su nivel de salida de forma correspondientemente más lenta sólo con desviaciones de control más pequeñas. El rebasamiento puntual mostrado se hace menos probable.
Si Xp está configurado demasiado bajo, el nivel de salida del componente P se reduce poco antes de alcanzar el punto de consigna. Cuando el valor del proceso entra en la banda proporcional, se reduce mucho el componente P y el valor del proceso cae. Debido a la mayor desviación de control, la proporción de salida aumenta y el valor real sube. En la banda proporcional, pequeños cambios en el valor real conducen a grandes cambios en la proporción de salida, lo que resulta en una alta tendencia a la oscilación. La calma se logra aumentando la banda proporcional.


